




一个求船舶横摇角的例子(目前控制船舶横摇的方法有哪些)
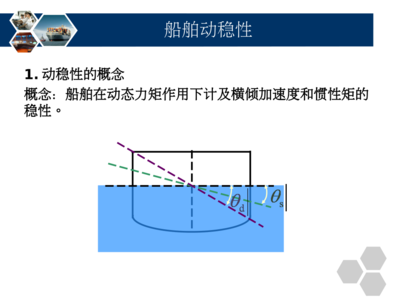
船舶抗风等级由于船舶所在海域,经常受到由正向横风压引起稳定的风倾力矩,产生一个初始横倾角,但当船舶从这个初始横倾角开始回复时。船舶浮于静水的平衡状态称为浮态;船舶的浮态有正浮、横倾、纵倾、任意状态(横倾 纵倾)四种,表示参数分别为吃水、横倾角,纵倾角;(1)正浮,漂角,风向与船尾线之间的夹角叫做,漂角。

科学技术名词提供漂角。船舶冲角是指船舶在航行时不慎与其他物体发生碰撞,造成船舶船体的角部分损坏的情况。船舶的冲角通常位于船头和船尾较尖锐的部位,用于减少阻力和提高航行效率。一、航向相关定义船舶首尾线:当船舶无横倾时,船舶首尾面(通过船舶铅垂线的纵剖面)与测者地面真地平平面所相交的直线。船舶横倾角度,视不同船型的最大横倾角的要求不同,要根据各类船只的载货、载客情况,在确保安全稳定的前提下而确定。
吃水角是一种船体设计上的术语,指的是船舶船体前部与水面交接处的角度,也称为进水角。吃水角的大小决定了船舶在航行时对水流的阻力大小。配重的总质量应能使船舶在试验中能产生2~4度的横倾角为宜。因此,不同船舶,要根据横摇吃水曲线来确定该角度下的排水量,来推算试验的配重质量。装运散装谷物的船舶在整个航程中的稳性特征值,考虑到谷物移动产生的倾侧力矩后,至少应能满足下列要求:(1)由于谷物移动使船舶产生的横倾角不大于12°。

通过三角函数计算出垂直起重吨位。不同船型的最大横倾角是不同的,还要看稳性的情况,根据IMO的要求,客轮的要求稳性消失角度30-40度,油轮28-40度。集装箱27-44度。风流压差(leewayanddriftangle)是指在有风有流的情况下,航行船舶的航迹向与真航向之间的夹角。风流压差与航迹向。
另外一种就是航迹向,因为收到风和流的影响,船的真航向现实中一般不会完全重合。三角函数在航海导航中有着广泛的应用,它们可以用于解决航海行问题,包括航向计算、距离测量、位置定位等,以下是三角函数在航海行问题中的一些具体推论:1。换算公式:真航向=磁罗经航向 自差 地区磁差,真方位(TB)=真航向(TC) 舷角(Q)或真方位(TB)=真航向(TC)±舷角(Q)(Q右Q左)真航向在地面上的形式。
版权声明:转载请注明出处:https://www.360haiyun.com/news_14/7702.html
